Single-Shot Refinement Neural Network for Object Detection
논문링크 : https://arxiv.org/pdf/1711.06897.pdf
Contribution
- 1-stage detector와 2-stage detector의 장점을 모두 활용
- 2-stage detector에서 주로 사용되던 아이디어를 1-stage detector에 도입
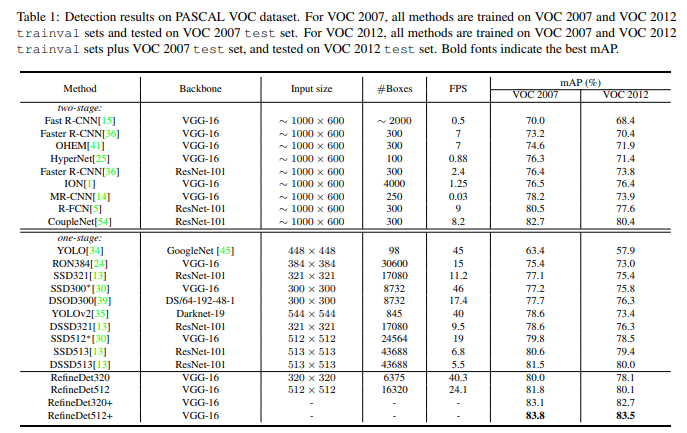
- 공개 당시, SOTA달성
Motivation
1-stage detector의 속도를 유지하면서도, 더 높은 정확도를 얻고 싶다.
Core idea
2가지 모듈 + TCB(Transfer Connection Block)
- ARM(Anchor Refinement Module) : backbone network에서 추출한 다양한 scale의 feature map을 입력 받아 negative anchor를 제거하고, anchor의 크기와 위치를 대략적으로 조정(refine)하여 ODM에 제공
- TCB(Transfer Connection Block) : ARM에서 출력된 feature map을 변환시켜 ODM에 전달, FPN과 비슷하게 multi-scale prediction 역할을 수행, 서로 다른 크기의 피쳐맵 정보를 활용하도록 도와주는 역할
- ODM(Object Detection Module) : (TCB에서 전달받은) refined anchor를 기반으로 객체에 대한 정확한 위치와 class label을 예측

ARM(Anchor Refinement Module)
- backbone network의 layer에서 feature map을 추출한 후, 해당 layer에 대하여 conv 연산을 추가한 구조
- refined된 anchor box의 위치 정보를 담고 있는 feature map과, 해당 anchor box의 foregraound/background label에 대한 정보를 담고 있는 feature map을 생성
- two-stage detector에서 사용하는 Region Proposal Network와 같은 기능을 수행

- 각 피쳐맵의 cell에 사전에 설정한 anchor 박스의 수를 할당
- anchor 박스에 positive, negative를 할당하며, ground truth와의 offset을 계산
- negetive anchor를 제거하여, positive:negative = 1:3으로 조절
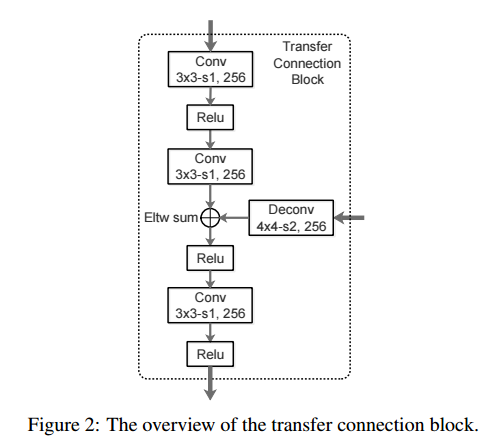
TCB(Transfer Connection Block)
- ARM의 각각의 layer로부터 비롯된 feature들을 ODM의 형태에 맞게 변환시켜주는 역할
- anchor와 관련된 feature map에 대해서만 적용
- 서로 다른 scale을 가진 feature map을 upsamling한 후, element-wise하게 더해주는 Feature Pyramid Network와 같은 역할
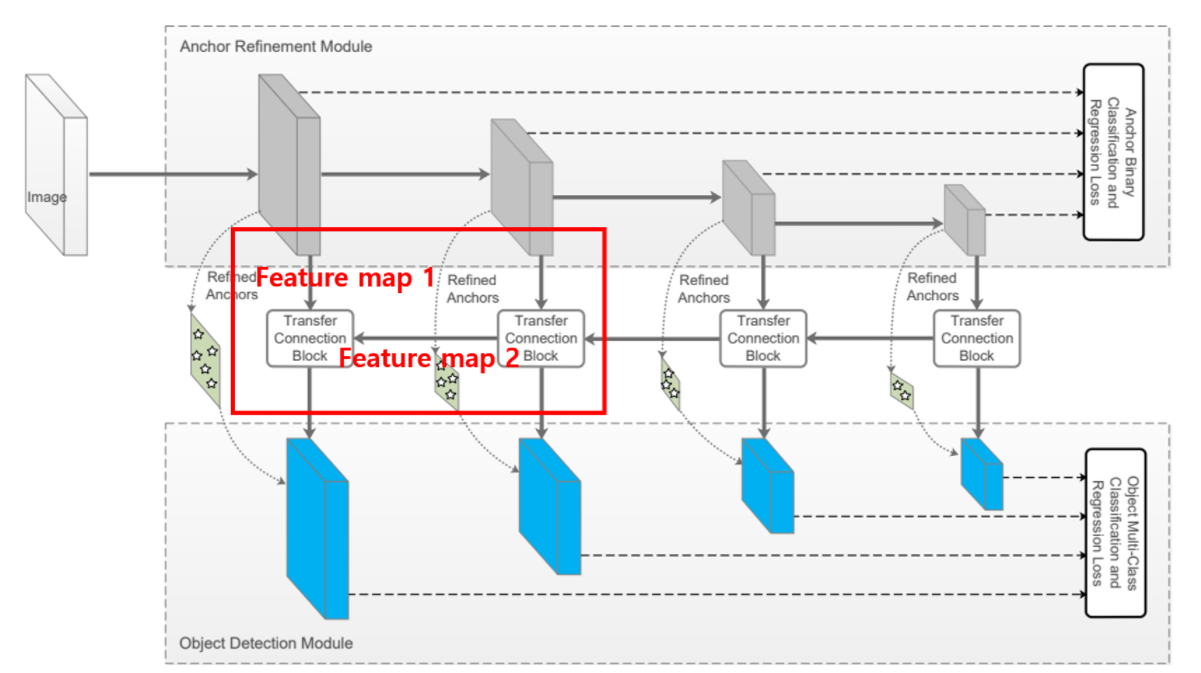
- [feature map 1]을 일련의 conv layer(conv-relu-conv)를 거쳐 feature map의 channel 수를 256으로 맞춤
- [feature map 2]는 backbone network의 후속 layer에서 추출한 feature map을 ARM, 그리고 TCB의 conv layer에 입력시켜 얻은 출력값
- [feature map 2]는 더 깊은 layer에서 추출했기 때문에 크기가 [feature map 1]에 비해 작음, [feature map 2]에 대하여 deconvoltution 연산을 적용한 후, [feature map 1]과 element-wise 연산
- 합쳐진 feature map을 conv layer(conv-relu-conv)에 입력하여 얻은 결과물을 ODM으로 전달
ODM(Object Detection Module)
- ARM으로부터 refined anchor에 대한 정보를 입력 받아, 객체에 대한 정확한 위치와 class label을 예측하는 역할
- ARM에서 얻은 feature map 중 positive/negative 여부에 대한 정보가 담긴 feature map과 TCB에서 전달받은 transfered features을 입력으로 받아, 각각에 대해 conv 연산을 적용하여 최종 prediction을 수행
- 최종 출력값은 bounding box regressors, class scores
기타
- RefineDet은 VGG-16 네트워크에 추가적인 layer를 부착한 형태의 backbone network를 사용

반응형
'머신러닝_딥러닝 > Object Detection' 카테고리의 다른 글
| (논문리뷰) CenterNet (2019) (곧, 작성 예정임) (0) | 2021.09.13 |
|---|---|
| (논문리뷰) CornerNet (2018) (0) | 2021.09.13 |
| (논문리뷰) Cascade R-CNN (2018) (0) | 2021.09.13 |
| (논문리뷰) CoupleNet (2017) (0) | 2021.09.13 |
| (논문리뷰) Deformable Convolution Network, DCN (2017) (0) | 2021.09.13 |